一、工程实例概况
自2004年以来,随着国家大规模建设铁路客运专线的开始,全国各地都在修建铁路客运专线,这些客运专线建成后,将形成我国将来的高速铁路系统,由于新建的客运专线一般都要求时速在250km以上,它的质量标准要求非常高,对于测量定位要求亦很高。我公司在福建承接了温福铁路福建段第Ⅲ标段施工任务,其中有多座特大型桥梁及隧道。其中有座宁德特大桥,全长8456.28m,温福端位于漳湾镇蒋沃村,福州端在宁德市天坪岗村进入笔架山隧道,桥梁跨越整个宁德海湾,其桥梁大部分位于宁德海湾中,海湾宽度有6km左右,在海湾内无法布设点位,控制网布设存在很大困难,用常规测量方法无法轻松实现。我们选用GPS进行测量控制。
二、GPS测量控制网的设计
GPS测量与常规测量工作相似,按照GPS测量实施的工作程序可分为以下三个阶段:技术设计、外业实施、数据处理。GPS测量是一项技术复杂、要求严格的工作,实施的原则是在满足精度与可靠度要求下,尽量地减少人力与物力,因此对各阶段工作必须精心设计、精心组织与实施。
2.1GPS控制网的精度等级设计
GPS施工控制网的等级应根据桥梁长度和精度要求等来确定,根据《全球定位系统(GPS)铁路测量规程》(TB10054-97)的规定,桥轴线长度超过2000m时,GPS网应按照B级网施测。其相邻点间基线精度用式1表示。
式1
式中:——距离中误差(mm)
——固定误差(mm)
——比例误差系数(mm)
——相邻点间距离(km)
根据式1,B级网的相邻点间基线精度规范要求a<8mm、b<1mm/km。
2.2基准设计
GPS测量获得的是GPS基线向量,它属于WGS—84坐标系的三维坐标差,而实际需要的是国家坐标系或地方独立坐标系的坐标。因此需要结合当地位置和有关规范规定,进行GPS网的基准设计。根据大桥的具体情况,坐标系统采用铁路通用的北京54坐标系。由于大桥位于东经119°35′、北纬26°30′左右,且方向与经线方向大致平行。故采用高斯3°带投影,中心经度为120°。经计算其长度变形为19mm,能满足长度变形不能大于25mm的规范要求。
2.3GPS控制网的布设
控制网的布设时,为了组成最强的图形,由相连的三个大地四边形组成,宁德海湾的两岸各布设了4个点,要求同岸侧的4个点相互之间必须通视,点位间间距不大于1000m,且为保证对卫星的连续跟踪观测和卫星信号的质量,要求点位上空应尽可能的开阔,在10~15°高度角以上不能有成片的障碍物,在点位周围约200m的范围内不能有强电磁波干扰源,如大功率无线电发射设施、高压输电线、高层建筑、成片水域等。GPS控制网一共由8个点组成,其网形简图如图1:

图1宁德特大桥控制网简图
外业实施
外业观测采用三台Timble5700双频GPS接受机,它的标称精度可达5mm±1ppm,满足精度要求。在精度和网型确定好后,就要进行外业观测,制定作业计划。明确需要观测那些基线,怎样观测能提高GPS网的效率、可靠性等指标?总的原则为,为了保证网的整体性和内符合度,先确定N1-N4-B1-B4为框架网点,后测定其余点相互及与框架点关系。具体做法为,先选取同步观测环,由于只有三台接收机,则三点为一同步环,共确定8个同步观测环,分别为N2-N3-B2、N2-B2-B3、N1-N4-B1、N1-N4-B4、N2-N3-N4、N2-N3-N1、B1-B3-B4、B1-B2-B4,既免去费时费力的绕过海湾来回搬站,提高了作业的效率,又能具有足够的多余的独立基线,每点至少有五条基线相连,保证网的可靠性。需要详细说明的,GPS网的可靠性是指网发现和抵御粗差能力,可靠性就是整网的多余独立基线数与总的独立基线数的比值,即:
其中:
为多余的独立基线数
为总的独立基线数
通过上面同步环的选取,可以得到网中总的独立基线为16条,多余的独立基线数为9条,则网的可靠性为0.56。
为提高网的精度和检核起算数据,用徕卡TCA2003全站仪精密测量了N1-B4、N4-B4两边的边长。
三、数据处理
GPS接收机采集的是接收机天线相位中心至卫星发射中心的伪距、载波相位和卫星星历等数据,而不是常规测量技术所测的地面点间的相对位置关系量(如边长、角度、高差等)。因而要想得到有实用意义的测量定位成果,需要对采集到的数据进行一系列的处理。GPS测量数据处理是指从外业采集的原始观测数据到最终获得测量定位成果的全过程。基本分为基线处理、三维无约束平差、二维约束平差三部分。此次都采用Timble的TGO软件计算。
3.1基线处理
在进行基线解算时,首先用软件读取原始的GPS观测值数据。开始解算前需要对观测数据进行必要的检查,检查的项目包括:测站名、点号、测站坐标、天线高等。软件对观测值进行各种模型改正,如对流层改正、电离层改正等,软件自动解算基线。基线解算完毕后,基线结果并不能马上用于后续的处理,还必须对基线的质量进行检验,基线的质量检验需要通过比率、RMS、参考方差、同步环闭和差、异步环闭和差和重复基线较差来进行(具体数值见表1)。只有质量合格的基线才能用于后续的处理,如果不合格,则需要借助观测值残差图对GPS观测值进行剔除处理,剔除那些残差较大和周跳严重的时间段的观测值,观测时间很短的卫星观测值也需剔除,数据的剔除率不得大于10%,若解算还不合格,则需补测直至基线合格。

注:σ为相应等级规定的精度;n为闭合环的边数
表1基线精度指标
3.2平差计算
基线解算完毕后,即用平差软件进行平差计算。首先软件上设置预先设计好的坐标系统,先进行三维无约束平差,GPS网的三维无约束平差是指平差在WGS-84三维空间直角坐标系下进行,平差时不引入使得GPS网产生由非观测量所引起的变形的外部约束条件,即只固定一点。三维无约束平差能很好的评定GPS网的内部符合精度,发现和剔除GPS观测值中可能存在的粗差,反映了GPS网本身的质量好坏,如果平差结果质量不好,则说明GPS网的布设或GPS观测值的质量有问题。判定三维无约束平差好坏的指标为基线分量的改正数(VΔX、VΔY、VΔZ),改正数的绝对值应小于3σ(σ含义与上同)。
在三维无约束平差精度符合要求后,在平面坐标系内进行二维约束平差。需输入约束点的坐标和其他距离或方位的约束值。约束点的选择是关键,约束点的内符合精度将直接网的平差精度,精度不高的约束点将把网整体进行较大的缩放和旋转。人为降低网的精度。平差时选择N1、B4为约束点。选择这两点有两个原因,一是它们是Ⅲ标整体控制网的控制点,为了大桥网与Ⅲ标网相统一。二是经过TCA2003精密测量边长的校核,两点相对精度较高,满足B级网的要求。判定二维约束平差好坏的指标有点位中误差、相对中误差、基线分量的改正数,其中基线分量改正数与三维无约束平差结果的同一基线的相应改正数较差的绝对值(dVΔX、dVΔY、dVΔZ)应小于2σ(σ含义与上同)。
3.3平差总结
经过平差处理后,网中最弱点位中误差为8mm,平均点位中误差为4mm,最弱边相对中误差1/257515,平均边长相对中误差1/732981。精度比常规测量要高许多,且误差稳定分布均匀。达到B级网要求。大桥测量控制点成果见下表2。
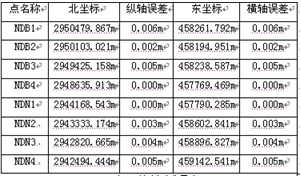
表2控制网成果表
四、几点体会
在这次布设控制网中,通过用GPS测设控制网,从布设、作业及后期的数据处理中得到一些体会,也是在今后做同样工作时需要注意的:
⑴ GPS控制网选点灵活,布网方便,基本不受通视、网形的限制,只需保证与足够的基线相连,当精度要求较高时,同一点最好不要少于四条基线,同时应避免短边,无法避免时,要谨慎观测。
⑵ GPS接收机观测基本实现了自动化、智能化,且观测时间在不断减少,大大降低了作业强度,观测质量主要受观测时卫星的空间分布和卫星信号的质量影响。但由于各别点的选定受外界条件限制,如B3点的树木遮挡和N2的高速公路干扰,还有涨退潮的多路径效应均影响对卫星的观测及信号的质量,经重测后通过。因此,应严格按有关要求选点,合理选择最佳时段观测,并适当增加重复设站次数。能显著提高观测数据质量。
⑶ GPS测量的基线处理是内业处理的最重要一环,需要合理的剔除观测值数据。
⑷ GPS网中的基线数量并不是越多越好,太多时反而会降低精度。且浪费人力物力,在保证网的可靠性的基础上,尽量减少基线数量。
⑸ 约束平差中约束点的选择,不恰当的约束点会人为降低网的精度,约束点的检核至关重要。

